Home
Resume
Learn From My Mistakes!
Use Your Shit & Fix It
Apr 21
Oracle — Get Fucked
Apr 9
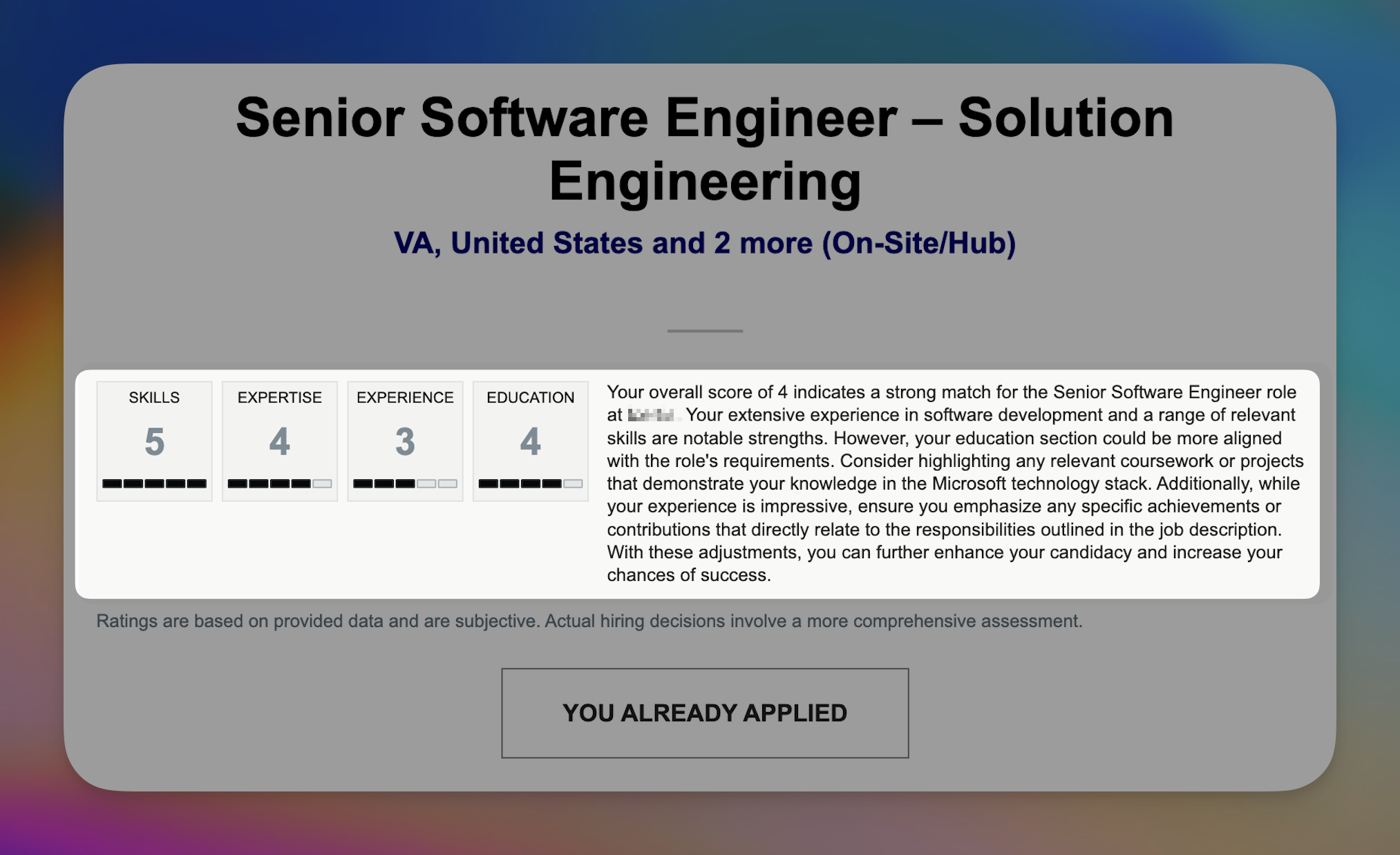
Interview What-the-Fucks
Apr 7
A Rebranding
Mar 25
I ❤️ Dog Food & Workday Is Terrible, Horrible, No Good, Very Bad
Mar 19
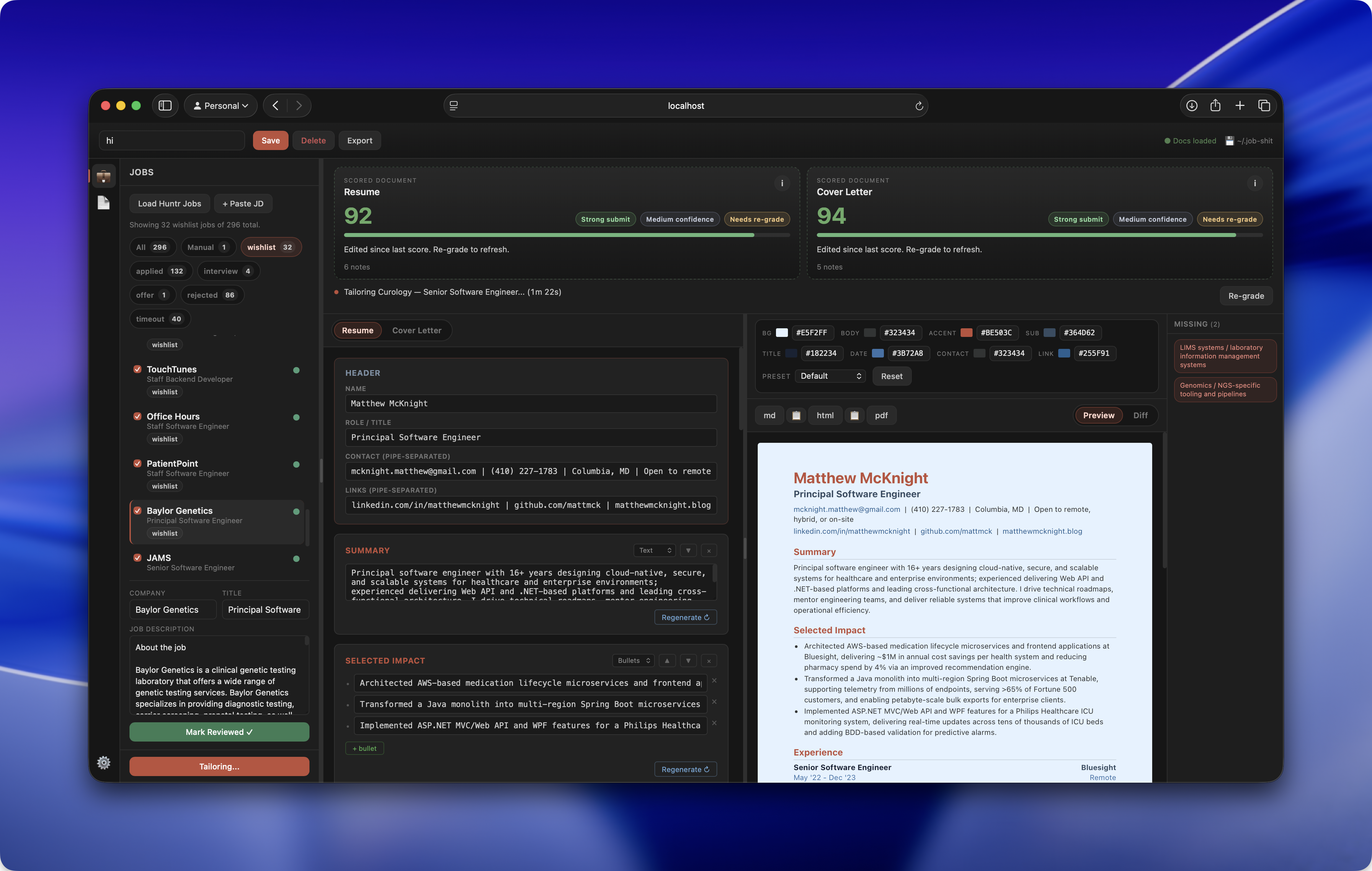
Resume Tailoring F’ing Sucks
Mar 17
Application What-the-Fucks
Mar 8
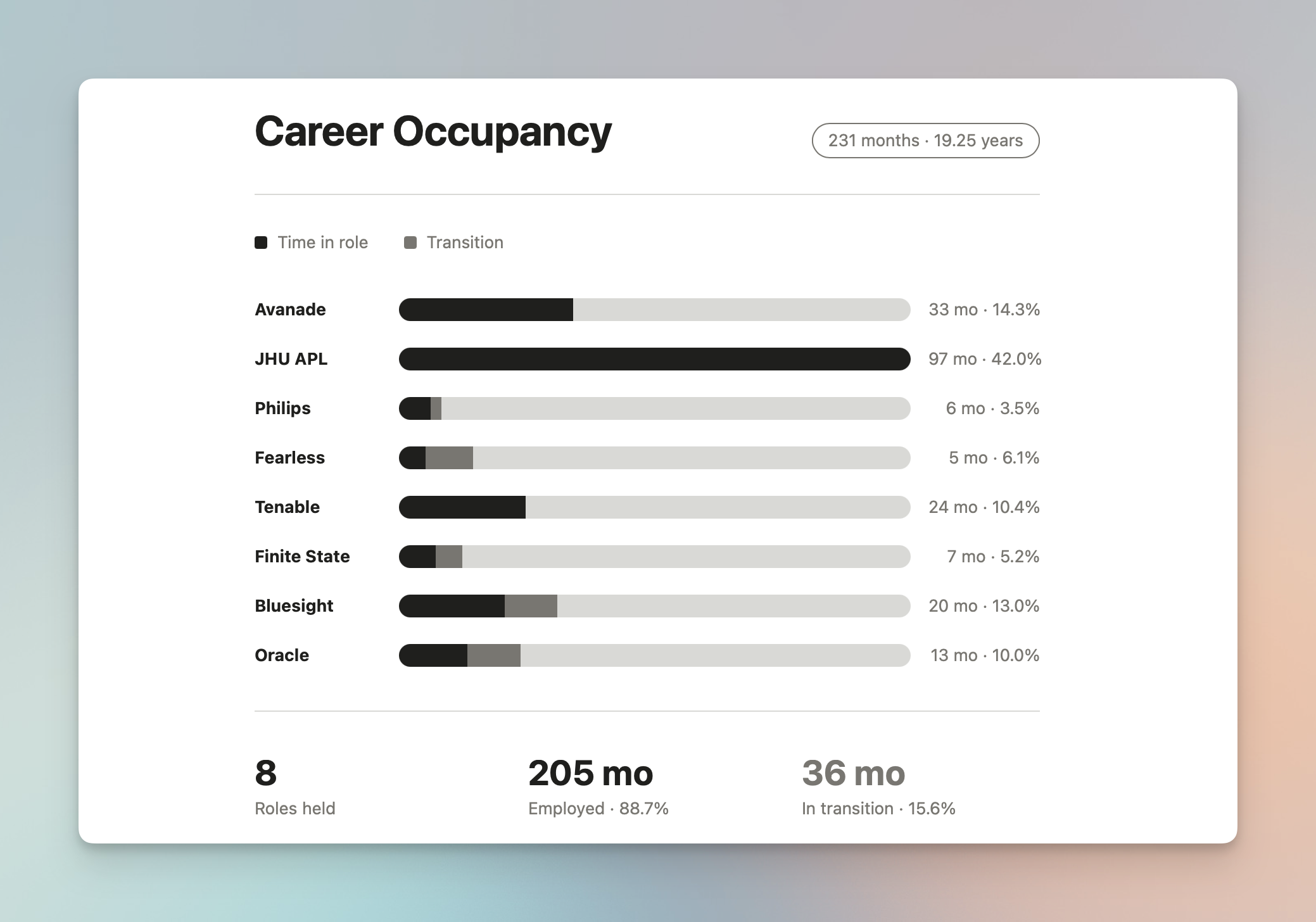
Unemployment Sucks, Now With Data!
Mar 7
I’m Building A Thing!
Feb 24
Automated Unemployment
Feb 23
Loading Comments...
Write a Comment...
Email (Required)
Name (Required)
Website